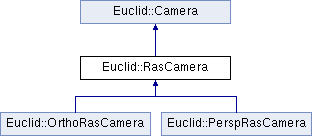
A camera model used for rasterization.
#include <Rasterizer.h>
|
|
| RasCamera ()=default |
| | Create a RasCamera.
|
| |
| | RasCamera (const Eigen::Vector3f &position, const Eigen::Vector3f &focus, const Eigen::Vector3f &up, float tnear, float tfar) |
| | Create a RasCamera. More...
|
| |
|
Eigen::Matrix4f | view () const |
| | Return the view/lookat matrix.
|
| |
|
virtual Eigen::Matrix4f | projection () const =0 |
| | Return the projection matrix.
|
| |
|
| Camera ()=default |
| | Create a Camera with default paramters.
|
| |
| | Camera (const Vec3 &position, const Vec3 &focus, const Vec3 &up, float tnear, float tfar) |
| | Create a Camera. More...
|
| |
|
void | lookat (const Vec3 &position, const Vec3 &focus, const Vec3 &up) |
| | Pose the camera according to the parameteres.
|
| |
| void | set_range (float tnear, float tfar) |
| | Set the range of the ray. More...
|
| |
|
|
using | Vec3 = Eigen::Vector3f |
| |
|
Eigen::Vector3f | pos { 0.0f, 0.0f, 0.0f } |
| | Position.
|
| |
|
Eigen::Vector3f | u { 1.0f, 0.0f, 0.0f } |
| | Right vector.
|
| |
|
Eigen::Vector3f | v { 0.0f, 1.0f, 0.0f } |
| | Up vector.
|
| |
|
Eigen::Vector3f | dir { 0.0f, 0.0f, 1.0f } |
| | Negative view vector.
|
| |
|
float | tnear = 0.0f |
| | The near plane.
|
| |
|
float | tfar = std::numeric_limits<float>::max() |
| | The far plane.
|
| |
| Euclid::RasCamera::RasCamera |
( |
const Eigen::Vector3f & |
position, |
|
|
const Eigen::Vector3f & |
focus, |
|
|
const Eigen::Vector3f & |
up, |
|
|
float |
tnear, |
|
|
float |
tfar |
|
) |
| |
|
inline |
- Parameters
-
| position | Position. |
| focus | Focus. |
| up | Rough up direction. |
| tnear | The near clipping plane. |
| tfar | The far clipping plane. |
The documentation for this class was generated from the following files:
 Public Member Functions inherited from Euclid::Camera
Public Member Functions inherited from Euclid::Camera 1.8.11
1.8.11 
